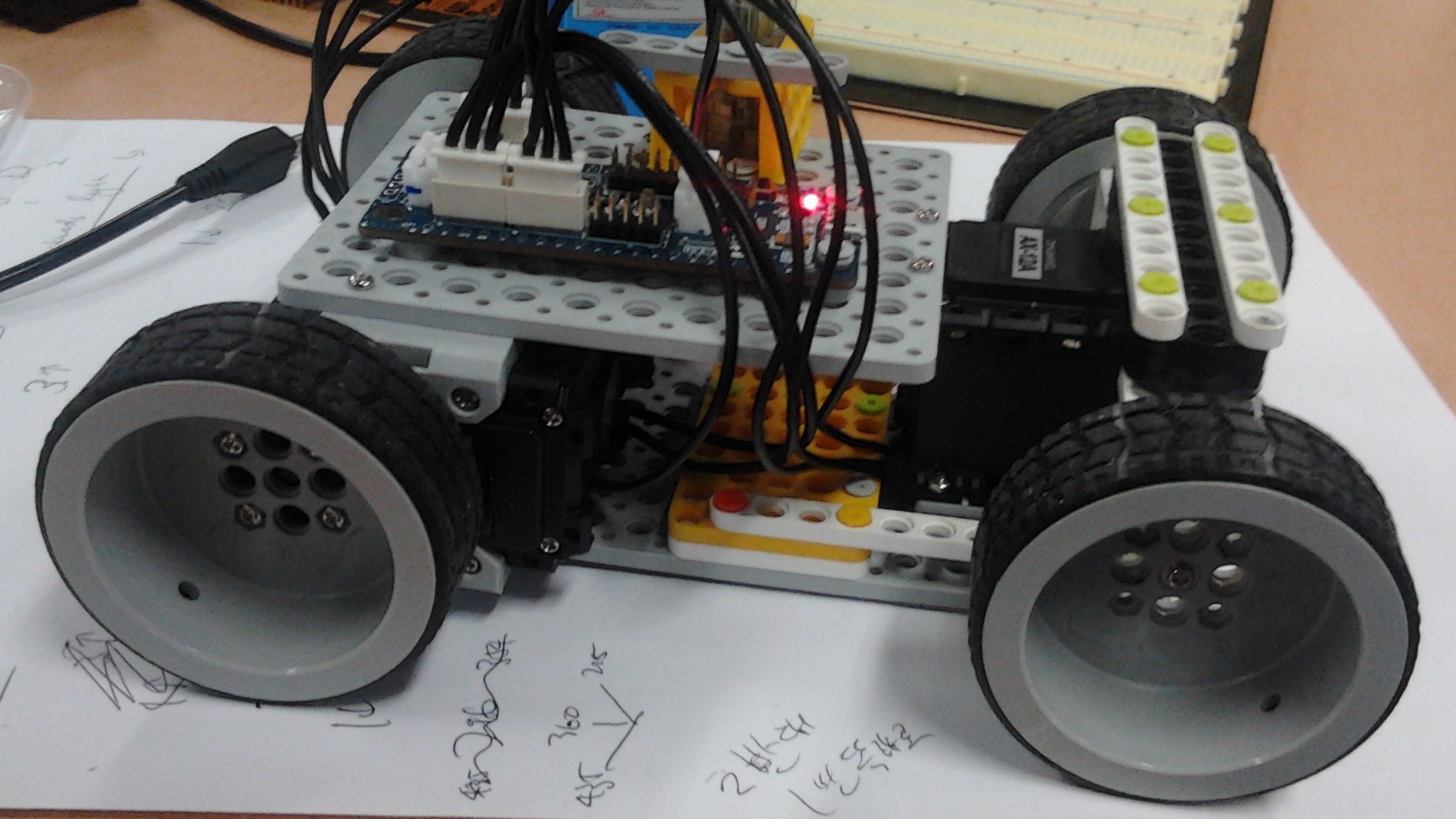
Along with the RC tank, I also made a RC car at ROBOTIS.
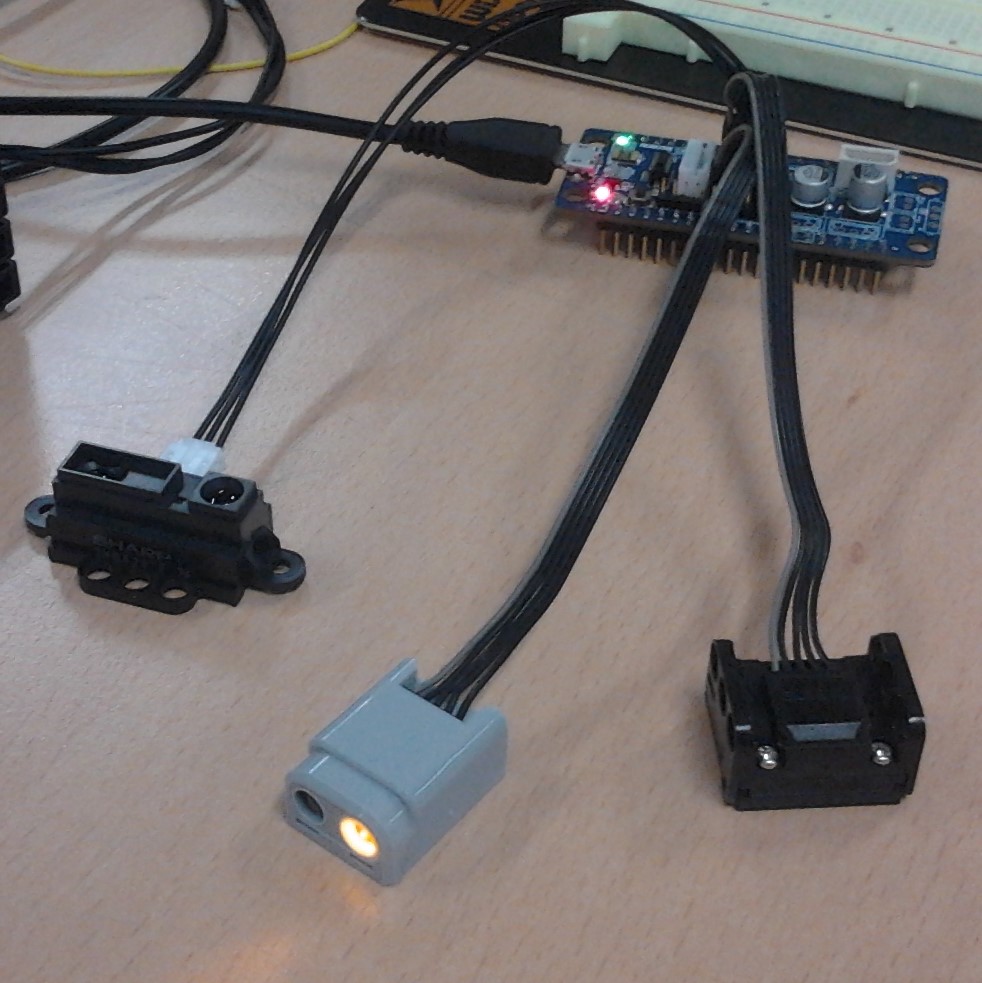
Two Dynamixel actuators were used for each of the back wheels, and a third actuator used to steer the forward axle. An ultrasonic distance sensor in the front and a touch sensor at the back provided rudimentary obstacle and collision detection, causing the car to immediately back away or move forward, respectively. The sensors that I toyed with are shown below.
As with the tank, I controlled the car with my phone via Bluetooth.
Two Dynamixel actuators were used for each of the back wheels, and a third actuator used to steer the forward axle. An ultrasonic distance sensor in the front and a touch sensor at the back provided rudimentary obstacle and collision detection, causing the car to immediately back away or move forward, respectively. The sensors that I toyed with are shown below.
As with the tank, I controlled the car with my phone via Bluetooth.